記事の詳細
夏を涼しくする! 近づくと自動で起動する扇風機を作ろう!

8月に入り、暑い日々が続いています。エアコンだけでは足りなくなり、扇風機を使おうと思っても、いちいち扇風機の電源を入れに行くのはめんどくさい!
そんなときは、人感センサを利用して自動で起動する扇風機を作ってみるのはいかがでしょうか。
自動で起動する扇風機を製作するにあたって、今回使用する重要パーツは、
- ラズパイマガジン2019年6月号特別付録「主要パーツ すぐに試せるボード」(完成品)
- 拡張基盤「RaspberryPi Zero用 焦電型赤外線センサ」
- 拡張用のボード
- モーター用プロペラ
以上の4つです。


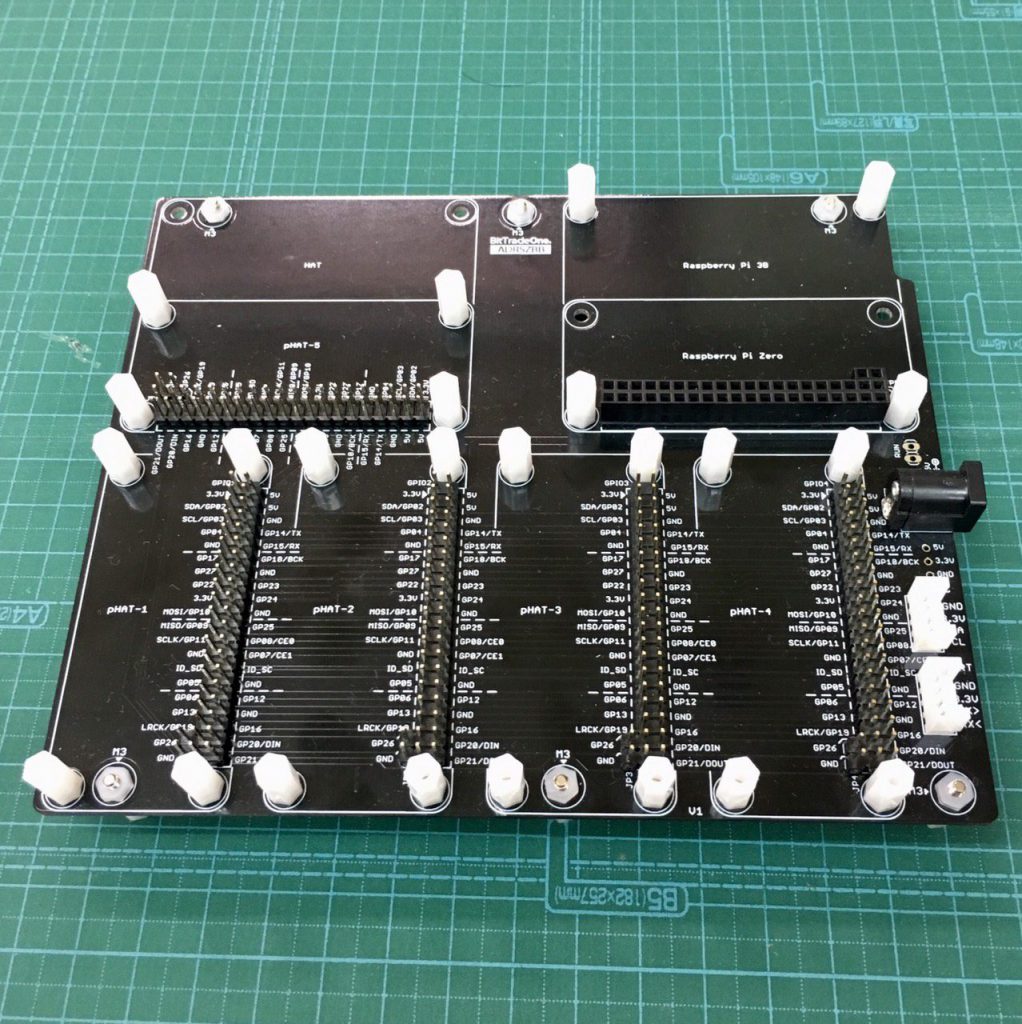
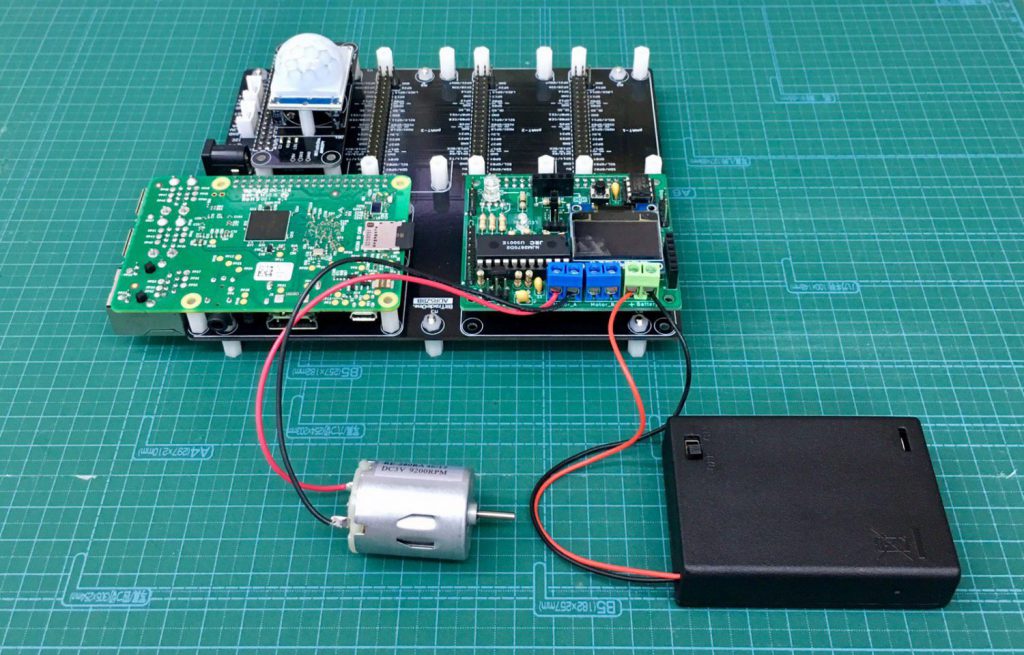
まず、すぐに試せるボードと焦電型赤外線センサを、拡張用のボード上にそれぞれ接続しましょう。
次に、モーターとそれを動かすための電池ボックスをそれぞれすぐに試せるボードに接続します。
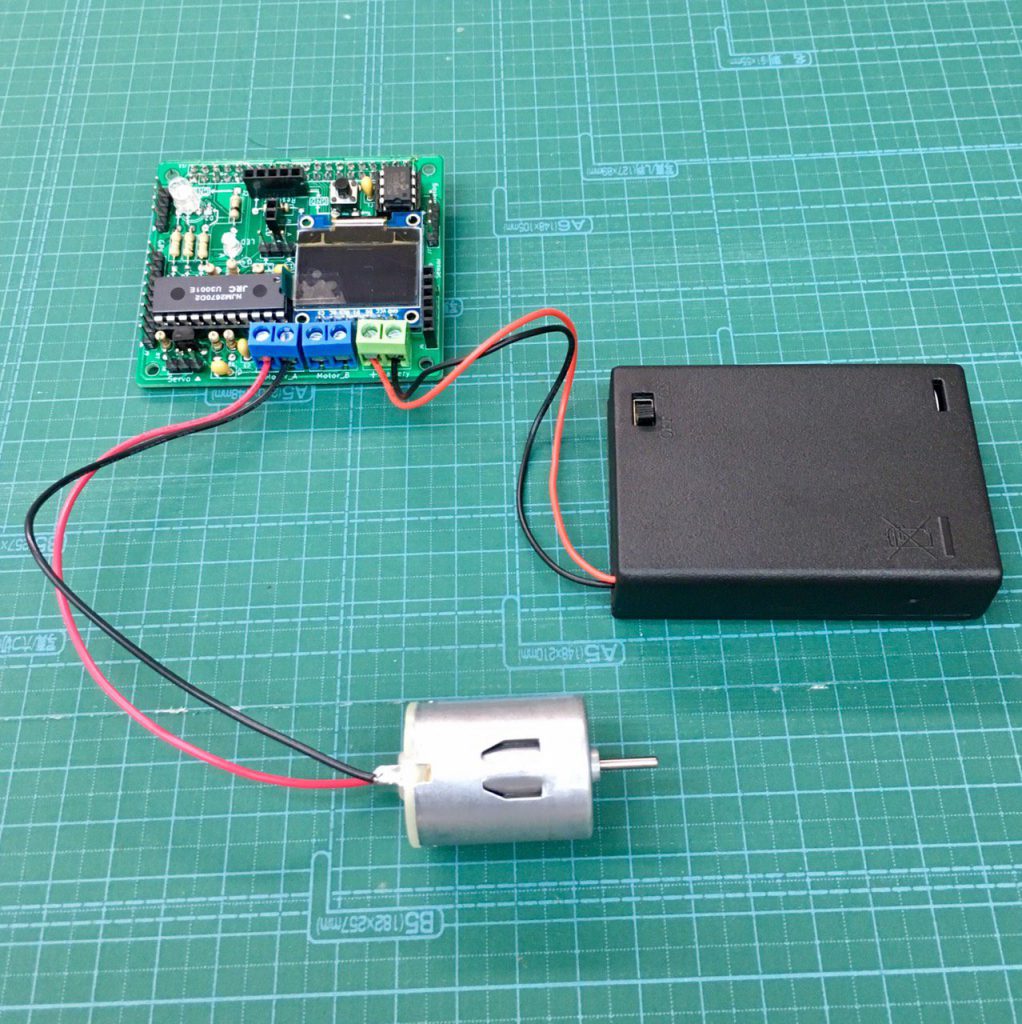
モーターの配線に向きは無いが、電池ボックスは赤い導線を+側に接続する。
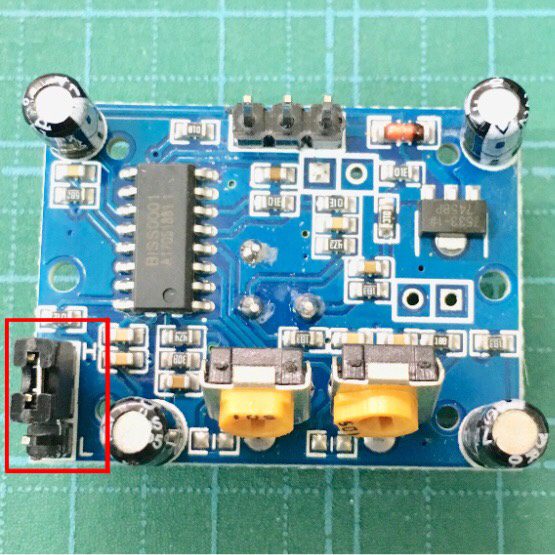
人を感知している間扇風機が回り続けるようにしたいので、焦電型赤外線センサをリピートトリガーモードに切り替えます。
焦電型赤外線センサを下側の基盤から取り外し、隅にあるヘッダピンを見るとHとLが書かれているので、ヘッダピンについている端子をH側に付け替えましょう。
これで一旦回路部分は完了です。次は、モーターを制御するためにプログラミングをします。
簡単にプログラミングをするために、Node-Redを使用します。
また、ラズパイマガジン2019年6月号の読者限定サイトから、特集1のファイルをダウンロードしておきましょう。読者限定サイトの提供期間は発売から1年間となっているので注意が必要です。
まず最初に、回路自体をシャットダウンするフローを作りましょう。基盤の取り外しをするときなどに便利になります。
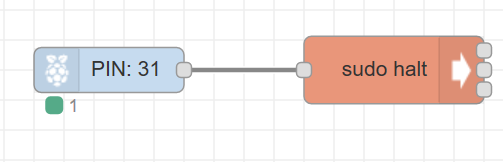
rpi gpio入力ノードは、GPIO 06-31に設定します。execノードのコマンドには、「sudo halt」と入力しましょう。右上のデプロイをクリックすれば適応されます。
次に、センサが反応したら扇風機が回るフローを作ります。
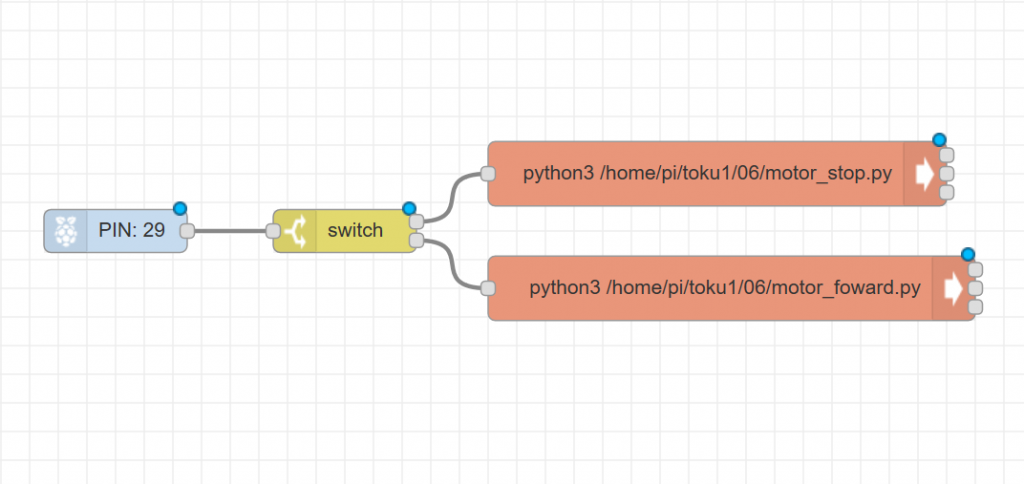
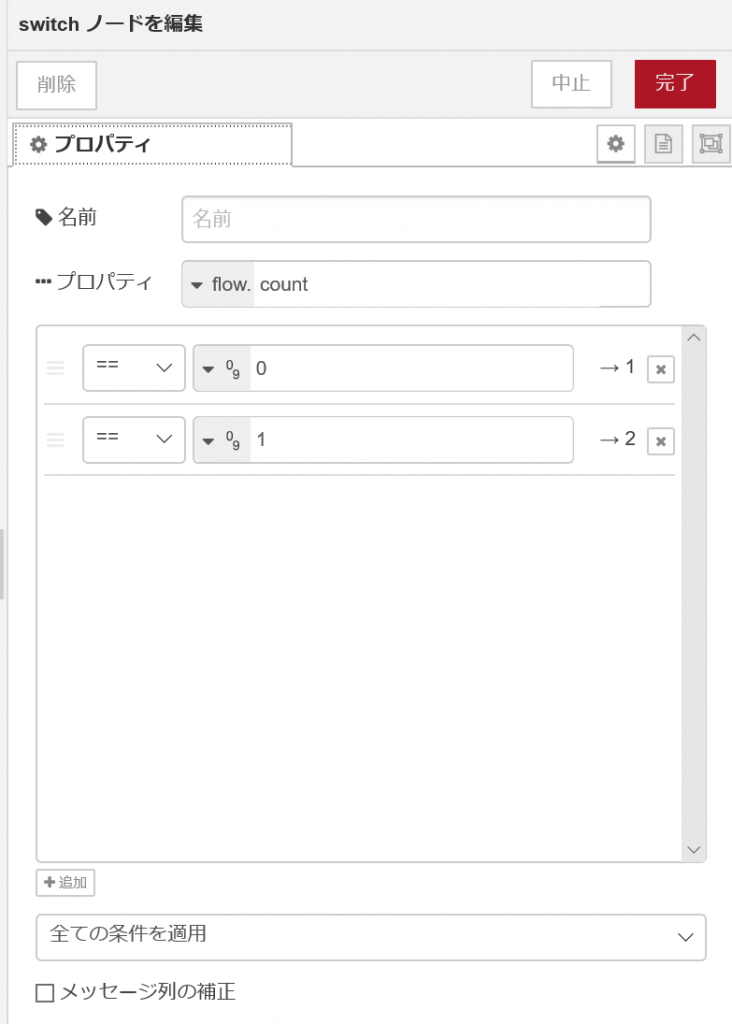
rpi gpio入力ノードはGPIO 05-29に設定します。switchノードには、以下の写真のように入力しましょう。

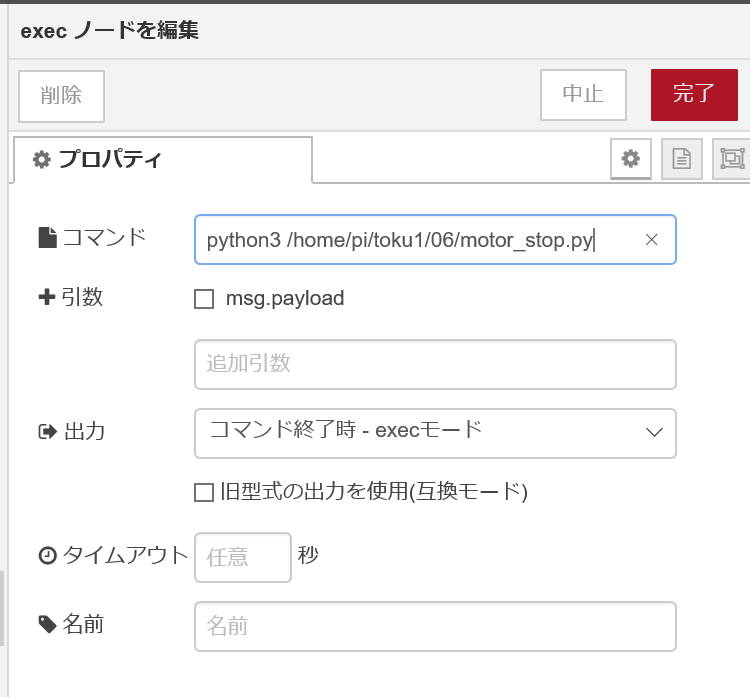
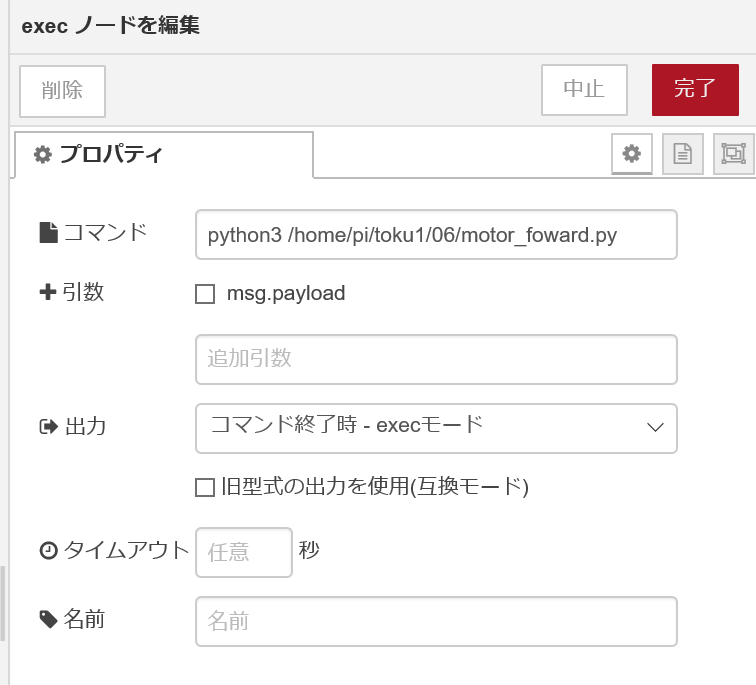
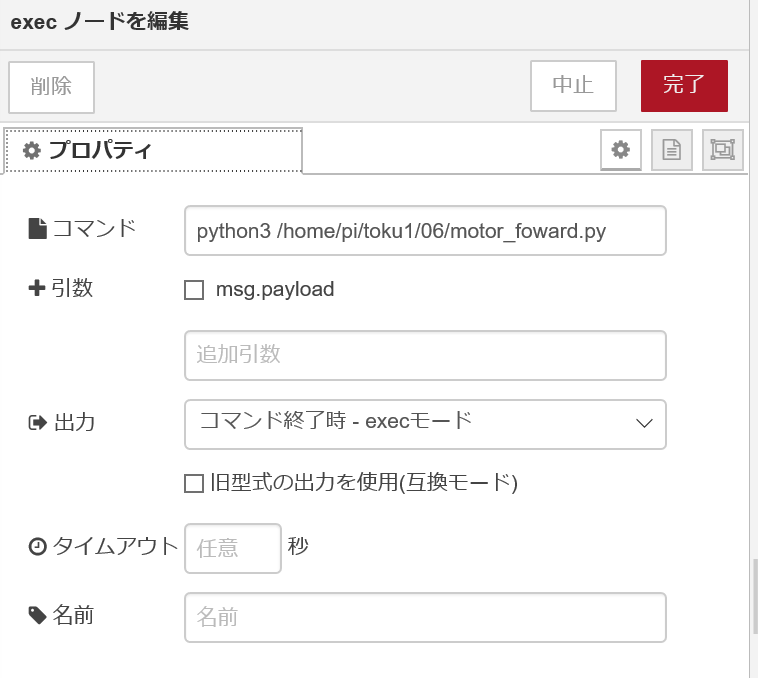
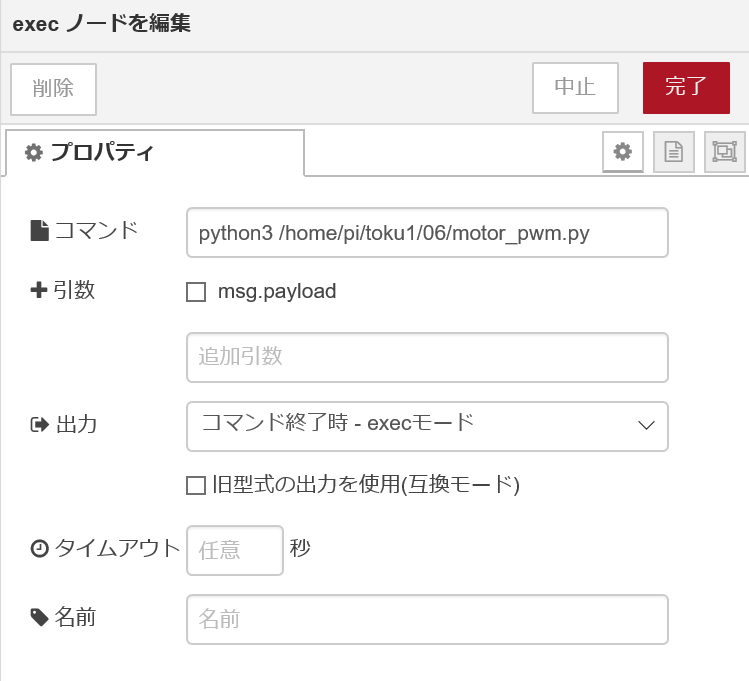
今、switchノードの上側は0、下側は1になっています。センサが反応したときは1、反応していないときは0なので、上側のexecノードにモーターの停止、下側のexecノードにモーターの駆動を設定します。モーターの停止、駆動は以下の写真のように入力しましょう。このとき、引数のチェックを外しておかないとうまく動作しません。
デプロイをすれば、センサが人を感知したときにモーターが回るフローが適応されます。
ただ、これだけだとモーターの回転速度は常に一定の状態です。つまり、扇風機の風が強いままですよね。
少し寒くなってきたかも…と思ったときは、風の強さを弱くできる機能があるとさらに便利です。なので、ここからさらに風の強さを切り替える機能を追加してみましょう。
まずは、モーターの回転速度を切り替える動作を作ります。
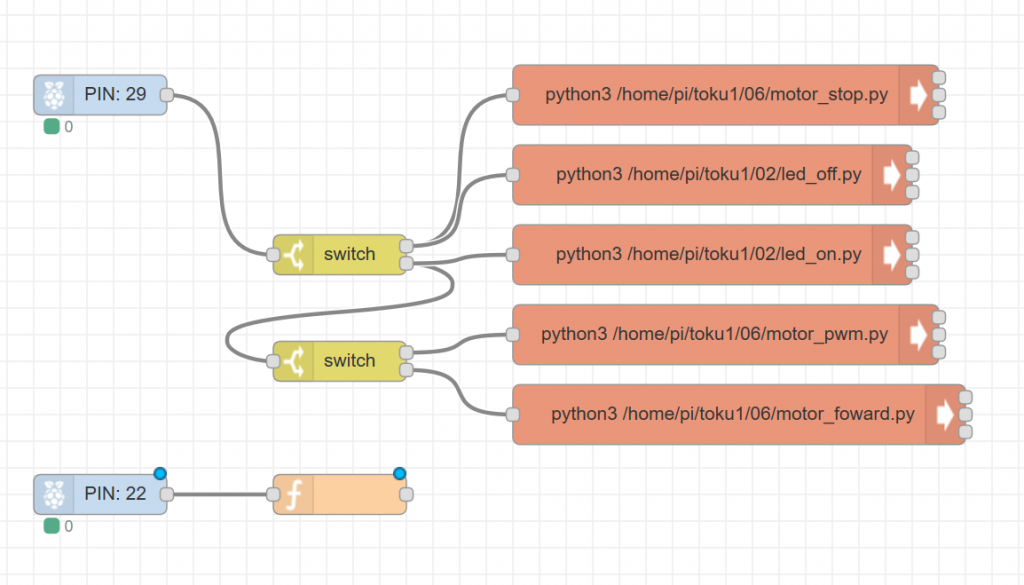
先ほどまでは、swAの下側(1が出力される方)に直接モーター駆動を接続していましたが、一旦外してswBに接続します。swBには、以下の写真のように入力しましょう。
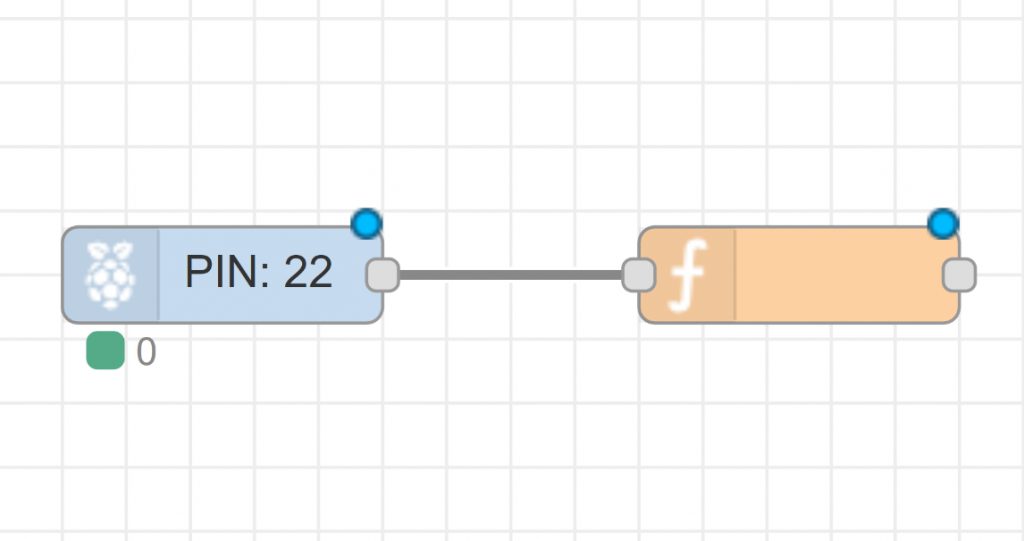
モーターの回転速度の強弱の切り替えは、すぐに試せるボードについているタクトスイッチで操作できるようにしたいので、rpi gpio入力ノードを配置して22-GPIO 25に設定します。
ファンクションノードには、以下の写真のように入力しましょう。
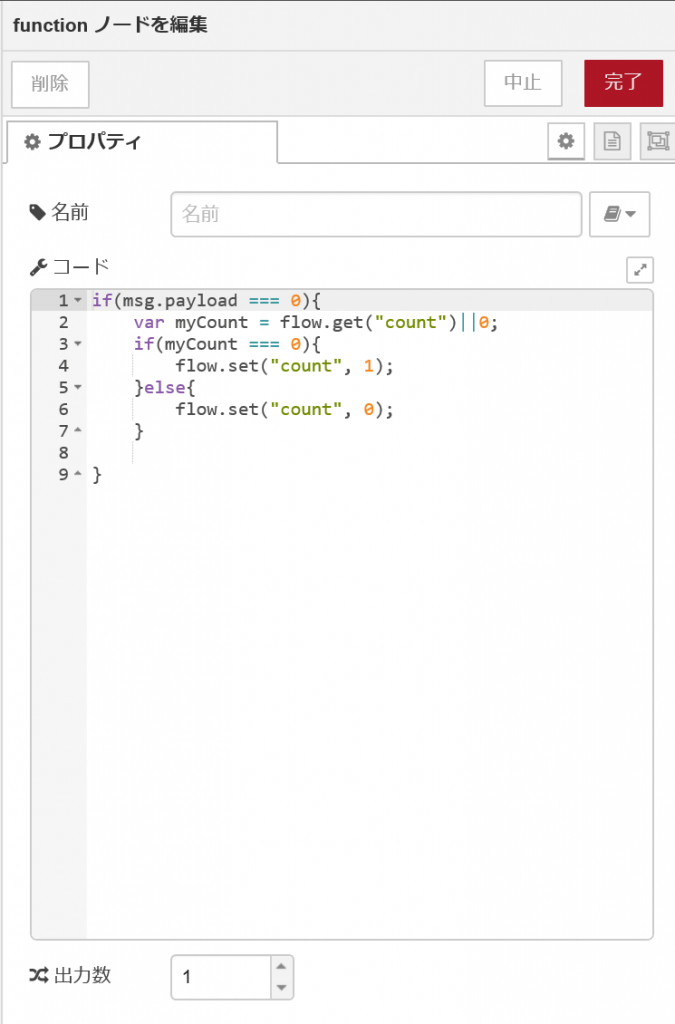
ファンクションノードのプログラムによって、タクトスイッチを押すたびにカウントを0と1交互に切り替えます。それをswBが読み取り、モーターの回転速度を切り替えるという仕組みです。
次に、モーターの回転速度のフローを作ります。
今、swBの上側は0、下側は1になっていますが、タクトスイッチを押せば交互に切り替わるため、高速と低速はswBの上下どちらに接続しても構いません。モーターの高速、低速は以下の写真のように入力しましょう。このとき、引数のチェックを外しておかないとうまく動作しません。
デプロイをすれば、風の強さを切り替えるフローが適応されます。
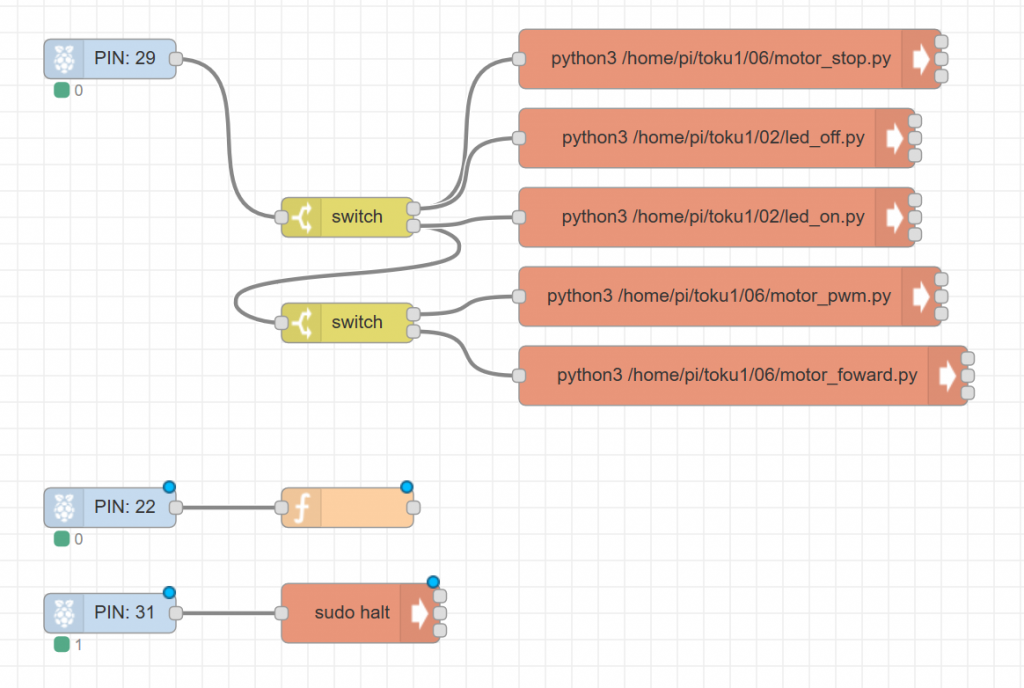
モーターが回っているときにLEDが点灯する機能も追加されている。
最後に、モーターの回転する向きに合わせてプロペラを付ければ、ようやく扇風機の完成といきたいところですが!!!
届くはずのプロペラが届かないという重大かつ致命的な問題が発生しました!
大変残念ながら、プロペラがないため自動で起動する扇風機の作り方の説明は終わりですが、本記事の内容は様々な応用ができますので、皆さんもぜひ試してみてください!
熱中症に気を付けて、快適な夏をお過ごしください!
アディオスアミーゴ !
今回の記事で使用した拡張ボード








