記事の詳細
汎用電動機制御基板をつかってロボットカーを製作してみよう!【ハード編】

https://github.com/bit-trade-one/ADRPT8C_Generic_Motor_Controller
↑サンプルプログラムはこちらから!↑
汎用電動機制御基板を利用して自律型のロボットカー略してラズ☆ロボ・カーを製作します。ロボットカー単体としては左右の距離センサと、左右のDCモータが、それぞれ独立して動いています。
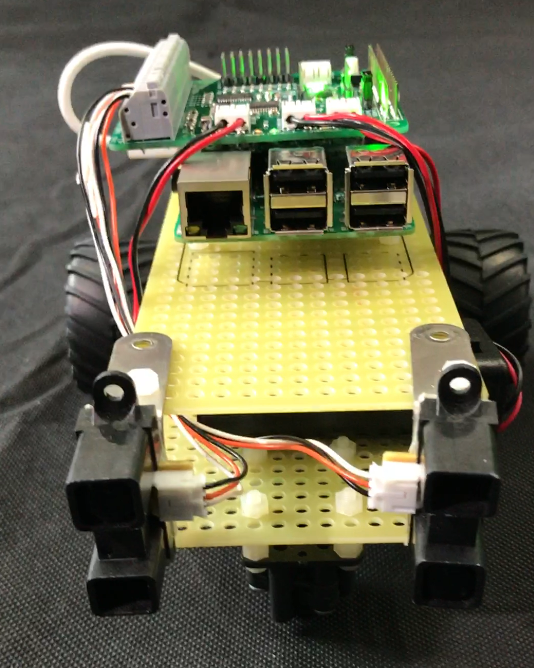
動画では単体で動いていますが複数をリンクさせてセンサ情報を、ラズパイ、NODE-RED、MQTTと経由して、もう一体の相手ロボットに送ることで、シンクロして連動させることができます。
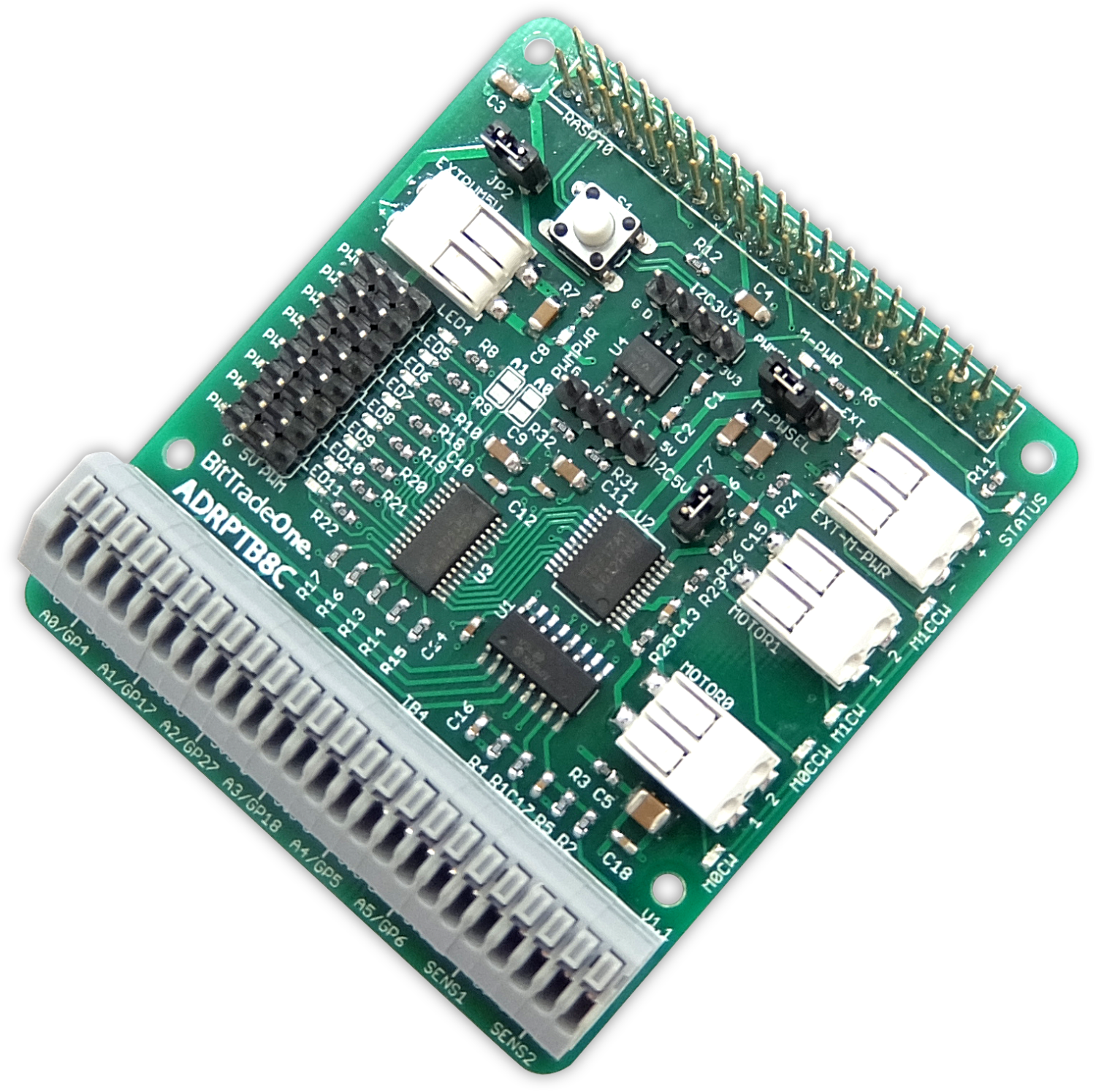
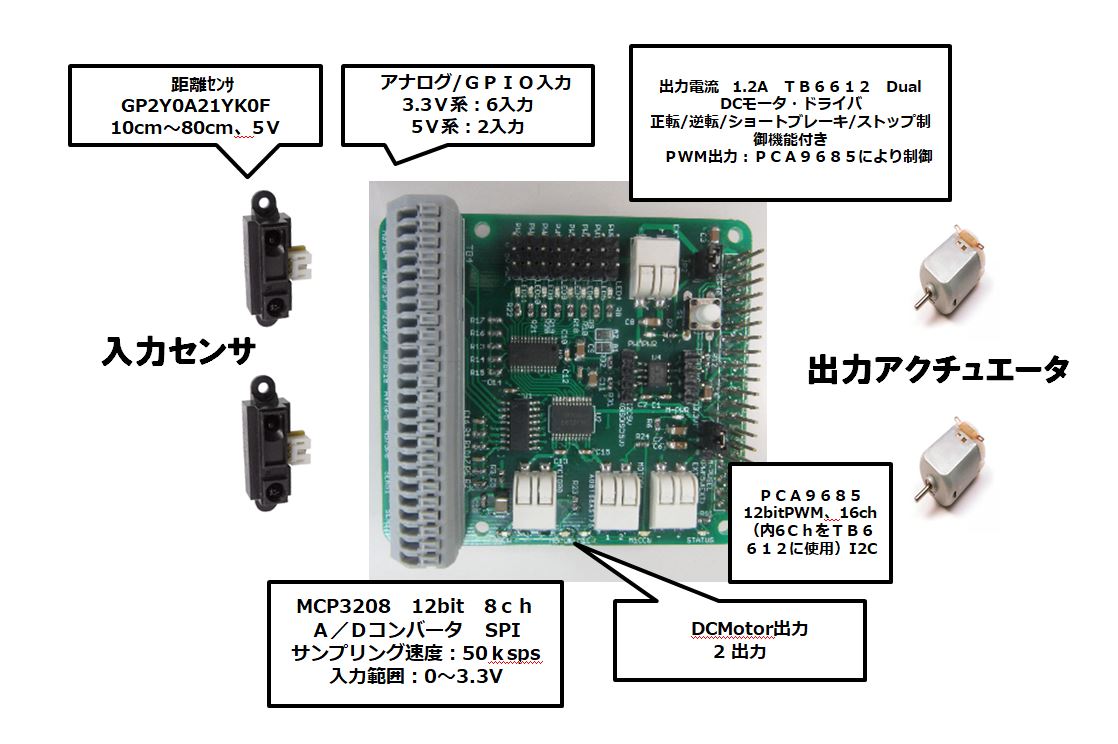
今回製作でとりあげる汎用電動機制御基板について、要点をあげると入出力6ch(アナログ入力、デジタル入出力兼用)5V対応アナログ入力2ch、PWM出力8ch、モータ出力2chをサポートしバランスの取れた入出力対応が特徴に思います。
arduino等、5V系の豊富なI2Cモジュールに対応できるようにI2C 5V系に対応しPWMで3ピンのサーボモータ(例:SG90)を、直接接続も可能です。
そういったわけで、ロボットカーを製作する過程で、必要な機能をまとめた製品となっていますが、アナログ入力と、DCモータ制御を一枚の基板で対応しているものは、なかなか見つからないと思います。
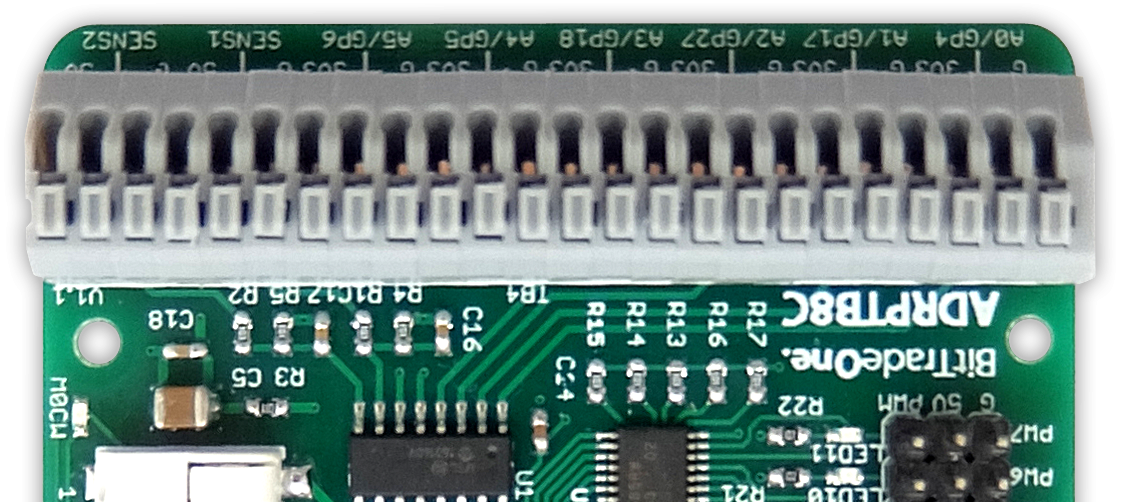
また、ソフトウェアエンジニアさんから、はんだ付けをできるだけしないでラズパイを扱いたいという要望がありましたので24極スクリューレス端子台を使いはんだ付けを不要としました。
その他、ロボットカーを製作する上で、モータ電源を、外部だけでなく、内部の5V電源も切り替えられるようにしDCモータの回転の向きが分かりづらく苦労したので、モータの回転方向の信号に色を変えてLEDで表示し、実際にモータをつながなくてもデバッグできるよう工夫しました。
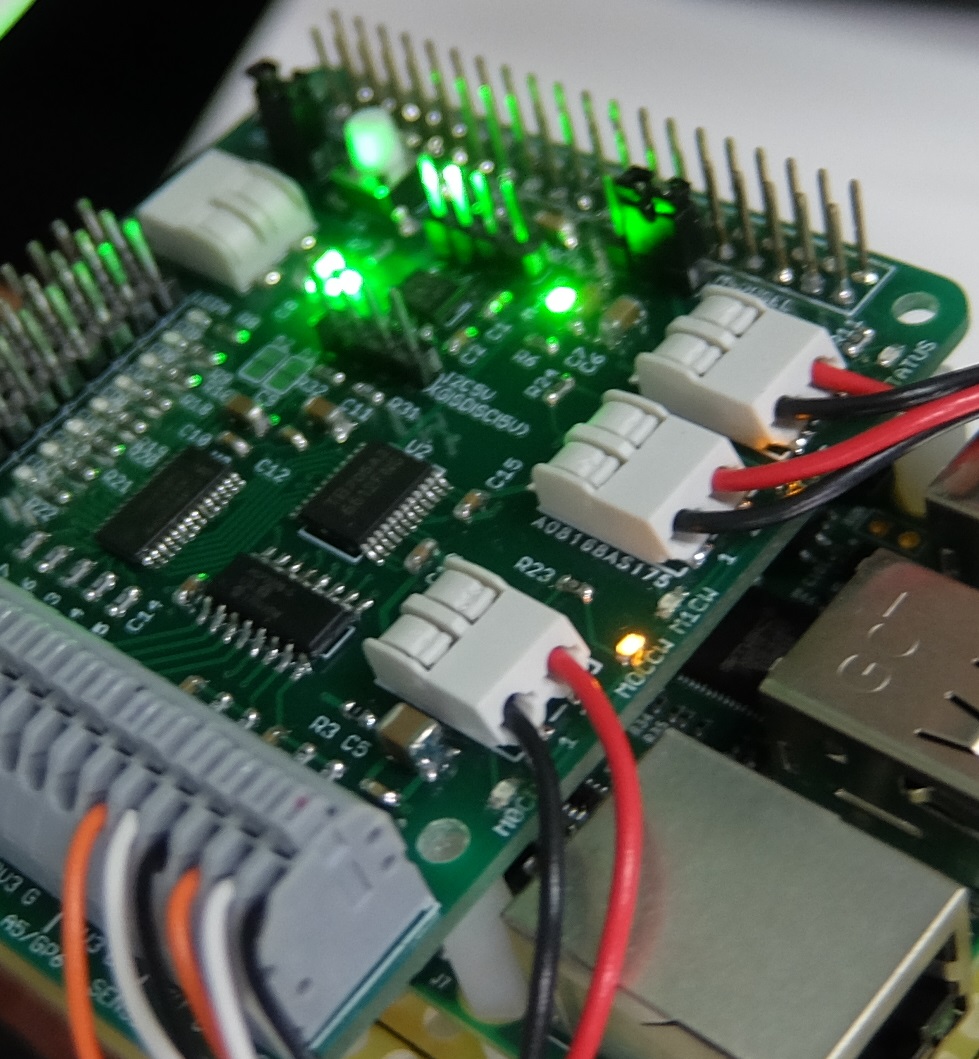
信号の見える化:時計回り:clock wise(CW)
反時計回り:Counter clock wise(CCW)
このように実験で楽しく遊べるロボットカーが、汎用電動機制御基板を使用することで、比較的簡単に製作することができます。
ロボット・カーを動かすには、多くの分野の技術を知る必要がありますが、本記事ではその技術、ノウハウを順番に説明していきます。
- ハード:必要なハードの構成
- ソフト:使用しているデバイス用のpythonプログラム
- システム:ロボット・カーを動かすためのNODE-REDプログラム
-
ハード:必要なハードの構成
ラズパイで、ロボットカーを作るには、センサで、周りの情報を入力し、モーターを動かす必要があります、ラズパイには、GPIOでデジタル入出力はできますが、アナログ入力、DCモータ出力を実現するために、ラズパイの上に汎用電動機制御基板を追加する必要があります。
ハードの全体図を示します
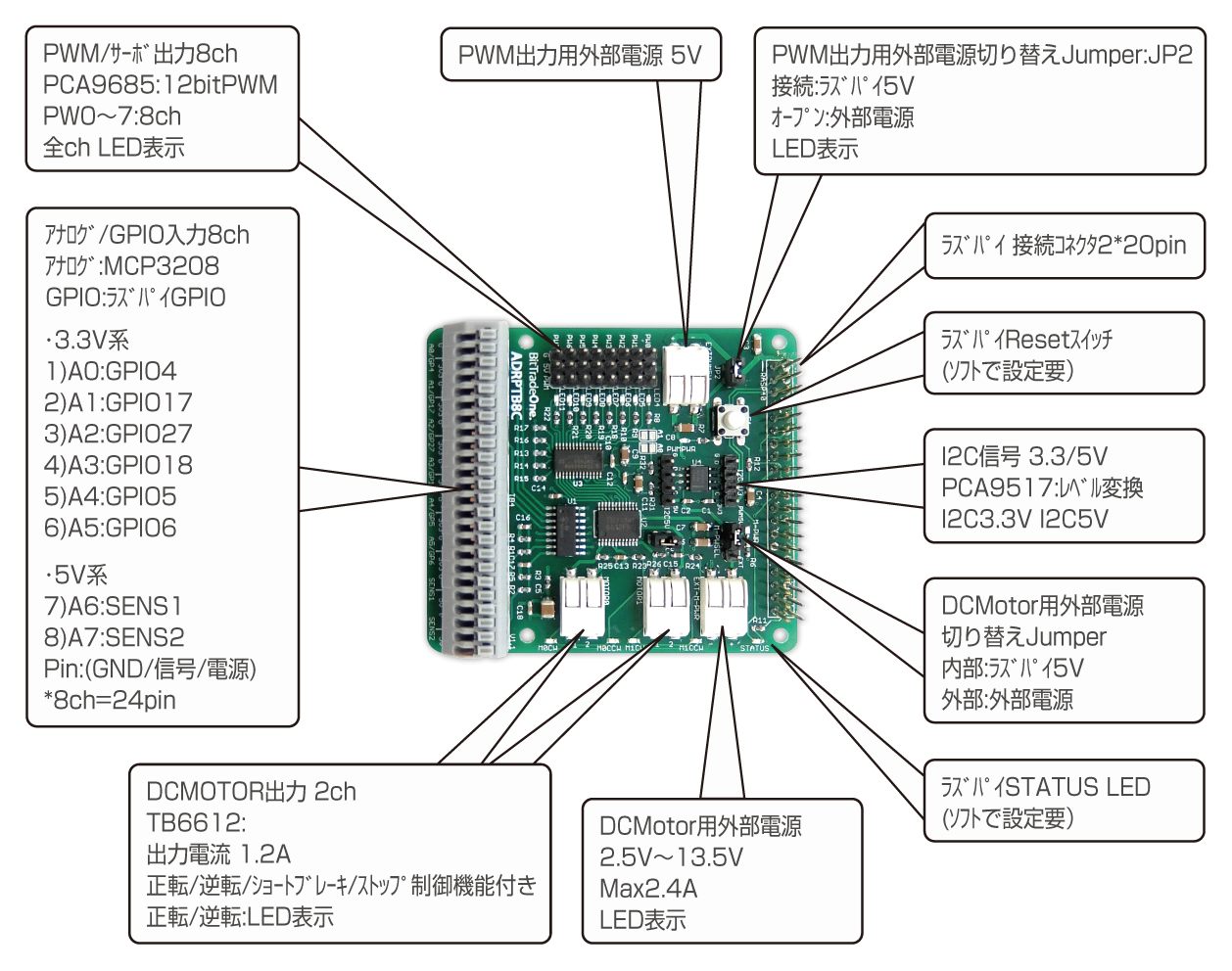
 汎用電動機制御基板の主要機能を示します。【汎用入出力】・アナログ入力 6ch、12bit 入力範囲:0~3.3V・アナログ入力 2ch、12bit 入力範囲:0~6.6V・デジタル入出力6ch ラズパイのGPIO 入出力範囲:0~3.3V【PWM出力】・8ch: 12bitPWM 出力範囲:0~5V、LED表示付き【モータ出力】・2ch:出力電流 1.2A モータ電源範囲:2.5~13.5V正転/逆転/ショートブレーキ/ストップ制御機能付き PWM出力、LED表示付き【I2C入出力】・3.3V系と5V系の両方の仕様に対応
汎用電動機制御基板の主要機能を示します。【汎用入出力】・アナログ入力 6ch、12bit 入力範囲:0~3.3V・アナログ入力 2ch、12bit 入力範囲:0~6.6V・デジタル入出力6ch ラズパイのGPIO 入出力範囲:0~3.3V【PWM出力】・8ch: 12bitPWM 出力範囲:0~5V、LED表示付き【モータ出力】・2ch:出力電流 1.2A モータ電源範囲:2.5~13.5V正転/逆転/ショートブレーキ/ストップ制御機能付き PWM出力、LED表示付き【I2C入出力】・3.3V系と5V系の両方の仕様に対応- 全体→制御基板 回路図を下記に示します。
- rasp-test-bench2_v11p_20170807_web_sch
- 次に、制御基板と、距離センサ、DCモータとの接続の回路図を下記に示します
- rasp-test-bench2_v11_20170721
端子図を下記に示します
必要な部品を下記に示します

部品をいろいろ揃えます。
ラズパイ3本体 1PCS
汎用電動機制御基板 1PCS
タミヤ製ダブルギヤボックス(左右独立4速タイプ)Item No:70168 モータ2ケ付き 1PCSタミヤ製オフロードタイヤセットItem No:70096 1PCS
タミヤ製ボールキャスターItem No:70144 1PCS電池ボックス(単3*2) DCモータ用 1PCS
モバイルバッテリ(ラズパイ稼働用) 1PCS
マイクロUSBケーブル 1PCS
距離センサ シャープ測距モジュール GP2Y0A21YK 2PCS
L字金具2枚(距離センサ取付用) 1PCS
そのほか、車体となるボードが必要になります。今回はこちらの適当なボードを使用しました。
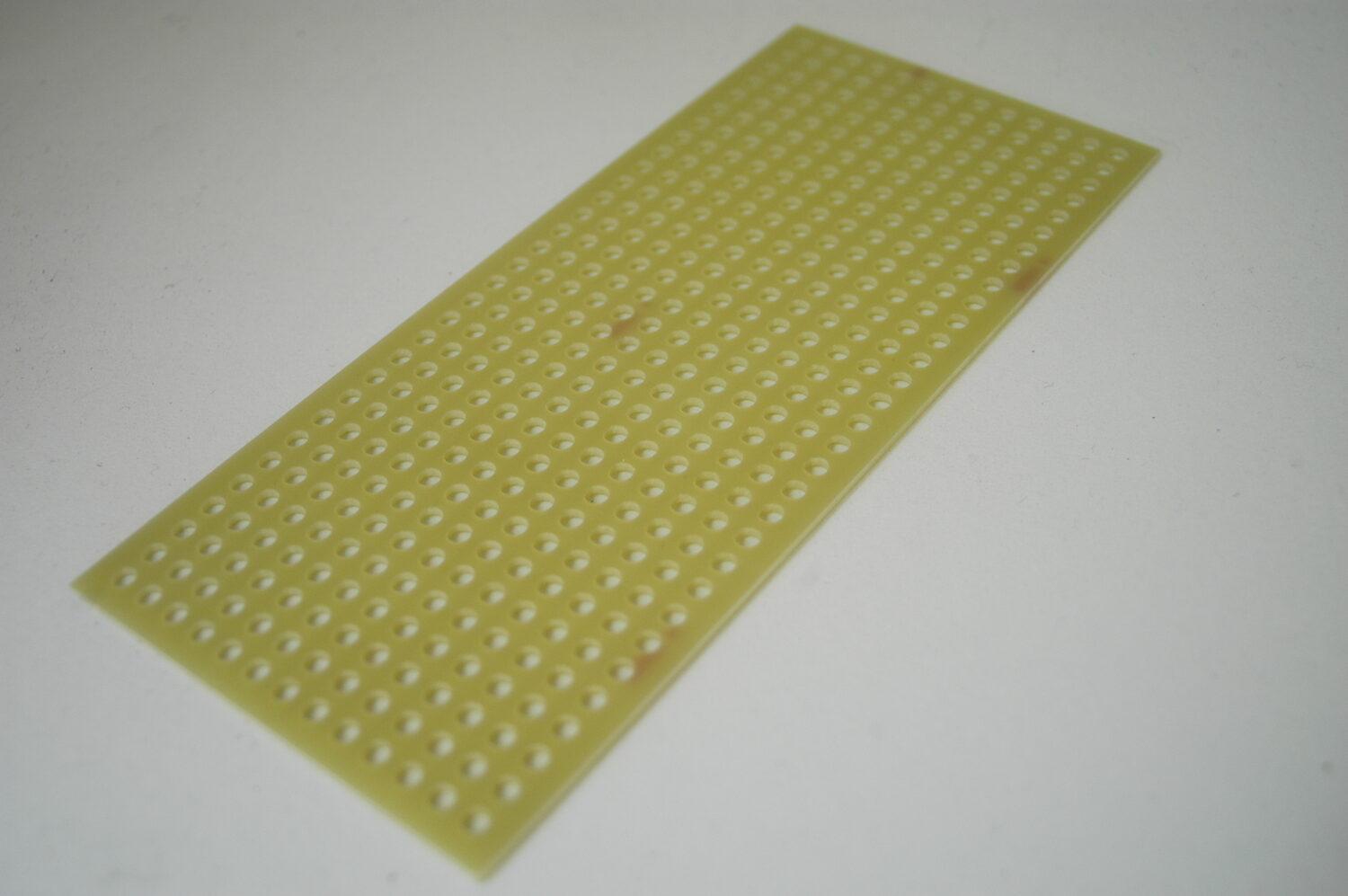
車体となる実装ボード(W160×70)この辺は適当に用意しましょう。
- ダブルギヤボックスを組み立て、左右のタイヤを取り付け
- ボードにダブルギヤボックス取り付け
- ボードに左右の距離センサを取り付け、ラズパイ3も取り付けます。
- ラズパイ3に、汎用電動機制御基板を取り付け、
- ボードに、電池ボックス(単3*2)を取り付け
- ボードに、モバイルバッテリを取り付けます。
次に配線をします。
- 左右の距離センサと、汎用電動機制御基板をそれぞれ3本の信号線で接続
- ダブルギヤボックスについている左右のモータと、汎用電動機制御基板をそれぞれ2本の信号線で接続
- 電池ボックスと、汎用電動機制御基板を2本の信号線で接続
- モバイルバッテリから、ラズパイ3に電源を接続(マイクロUSBケーブル使用)
ここまでで、ハードは完成です、部品がそろえば、数時間でできると思います。
次回はソフトウェアについて解説します!おたのしみに!